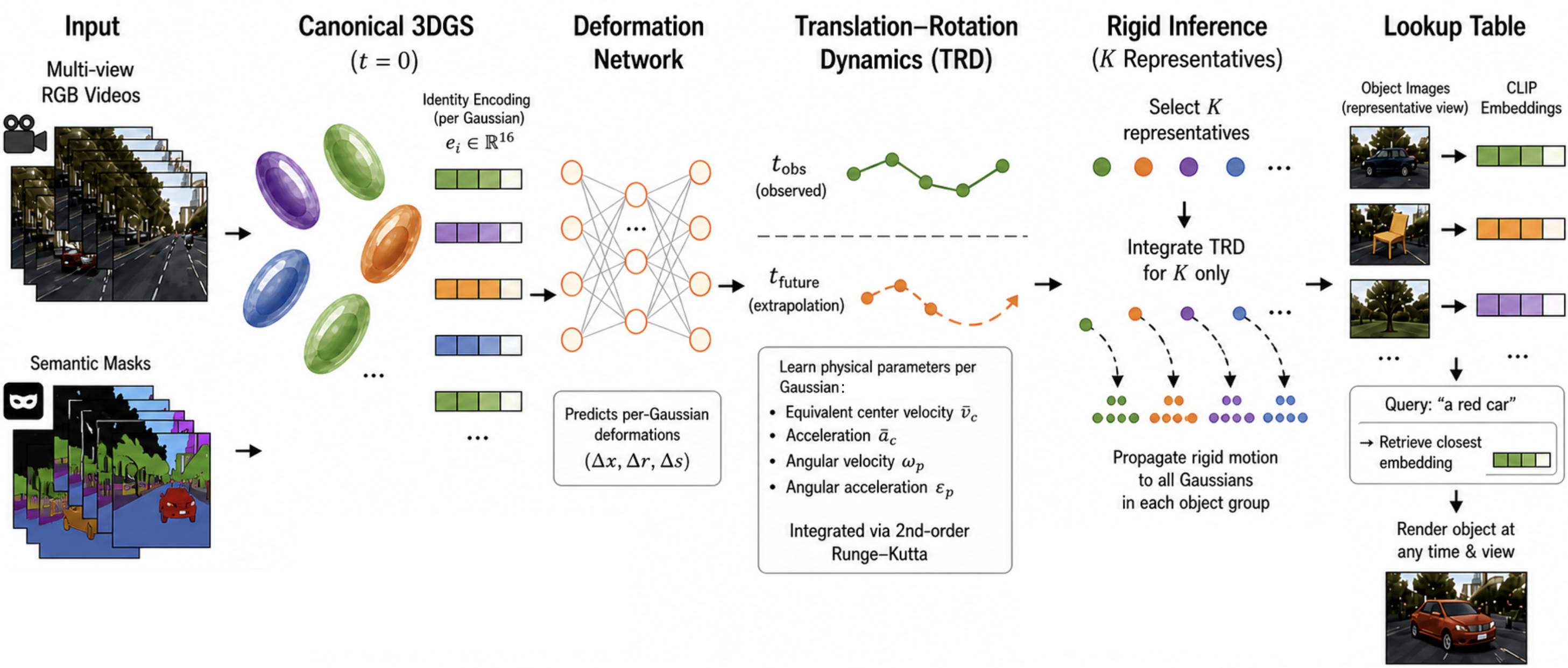
We present R5DGS, a framework that extends physics-informed 4D Gaussian Splatting
with instance-level semantics and rigid-body constrained extrapolation for efficient
dynamic scene reconstruction. Our method augments each Gaussian with a compact
learnable identity vector, enabling discrete object grouping without 3D annotations.
By restricting dynamics prediction to representative Gaussians per object
(typically 9-12) rather than the full set (~40,000), we achieve a consistent
~11 FPS speedup during extrapolation on NVIDIA RTX 4090
while preserving physically plausible motion trajectories.
Additionally, we construct an offline CLIP-based lookup table that enables
open-vocabulary object retrieval from natural language prompts, supporting
selective rendering and scene editing without retraining.
Key Results
FPS Speedup
+11 FPS
Inference Complexity
O(N) → O(K)
Representatives / Scene
9-12
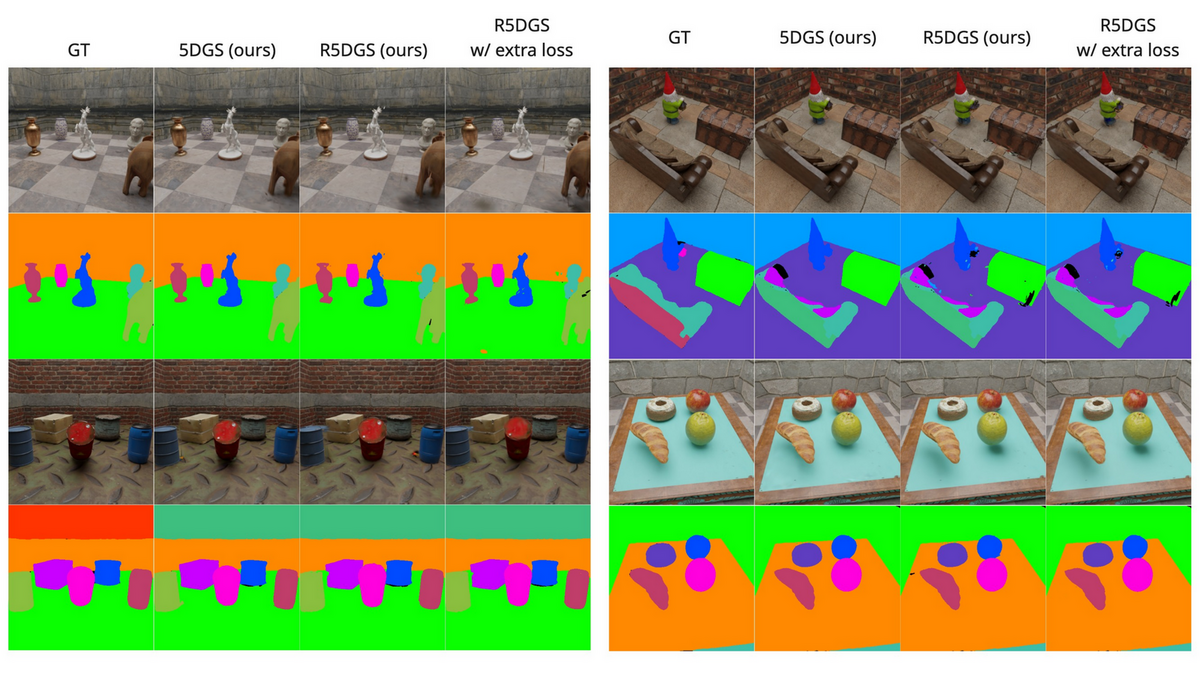
mIoU (Overall)
0.59
Open-Vocab. Retrieval
CLIP-based